Procesamiento de coincidencias
La elección del robot, fuente de soldadura, seguridad y dispositivos de fijación debe coincidir con el plano de la pieza y el objetivo de calidad de la soldadura.
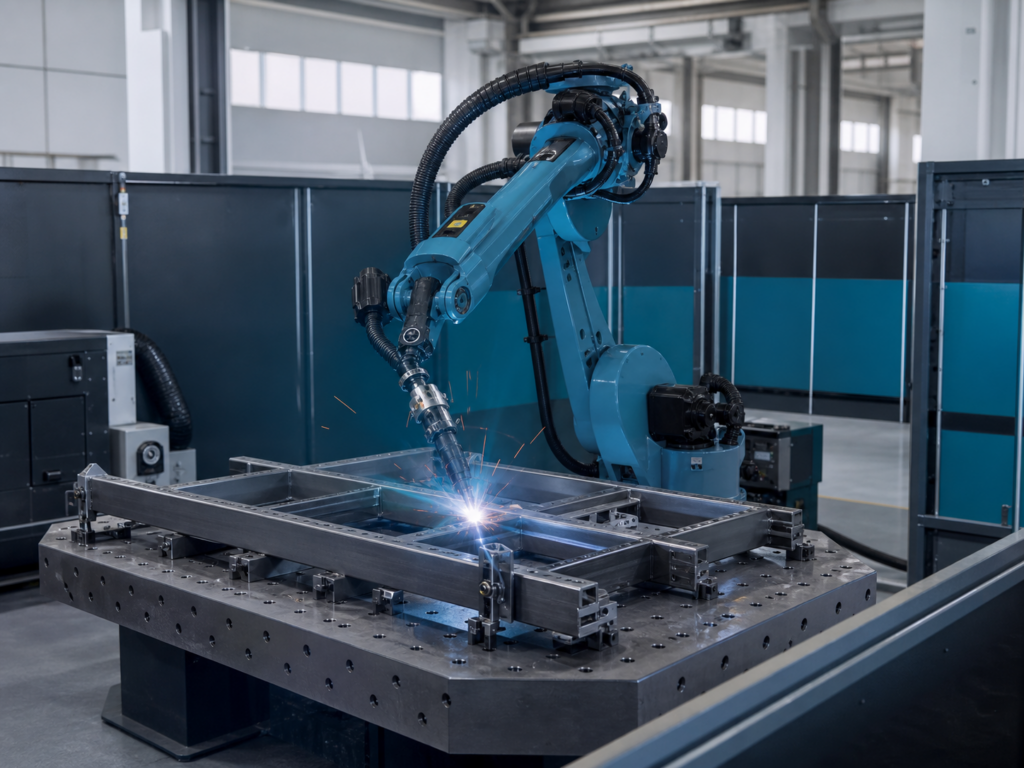
Estación de trabajo compacta de soldadura por puntos para dispositivos de fijación pequeños, piezas de chapa metálica de menor volumen y cambios de producción flexibles.


Estación de trabajo compacta de soldadura por puntos para dispositivos de fijación pequeños, piezas de chapa metálica de menor volumen y cambios de producción flexibles.
Estación de trabajo de soldadura por puntos compacta para utillajes pequeños, piezas de chapa de menor volumen y cambios de producción flexibles. Celdas de robot de soldadura por puntos con pinza servo para chapa metálica, componentes de automoción, paneles de electrodomésticos y producción basada en utillajes.
La elección del robot, fuente de soldadura, seguridad y dispositivos de fijación debe coincidir con el plano de la pieza y el objetivo de calidad de la soldadura.
Envíe material, espesor, longitud de soldadura, cantidad, tiempo de ciclo y mercado de destino para acelerar la primera recomendación.
Daophin puede discutir el diseño de accesorios, la guía de instalación, la capacitación y la planificación de la entrega lista para exportación.
| Parameter | Especificación |
|---|---|
| Formato del robot | celda colaborativa |
| Best fit | accesorios pequeños |
| Options | paquete de seguridad compacto |
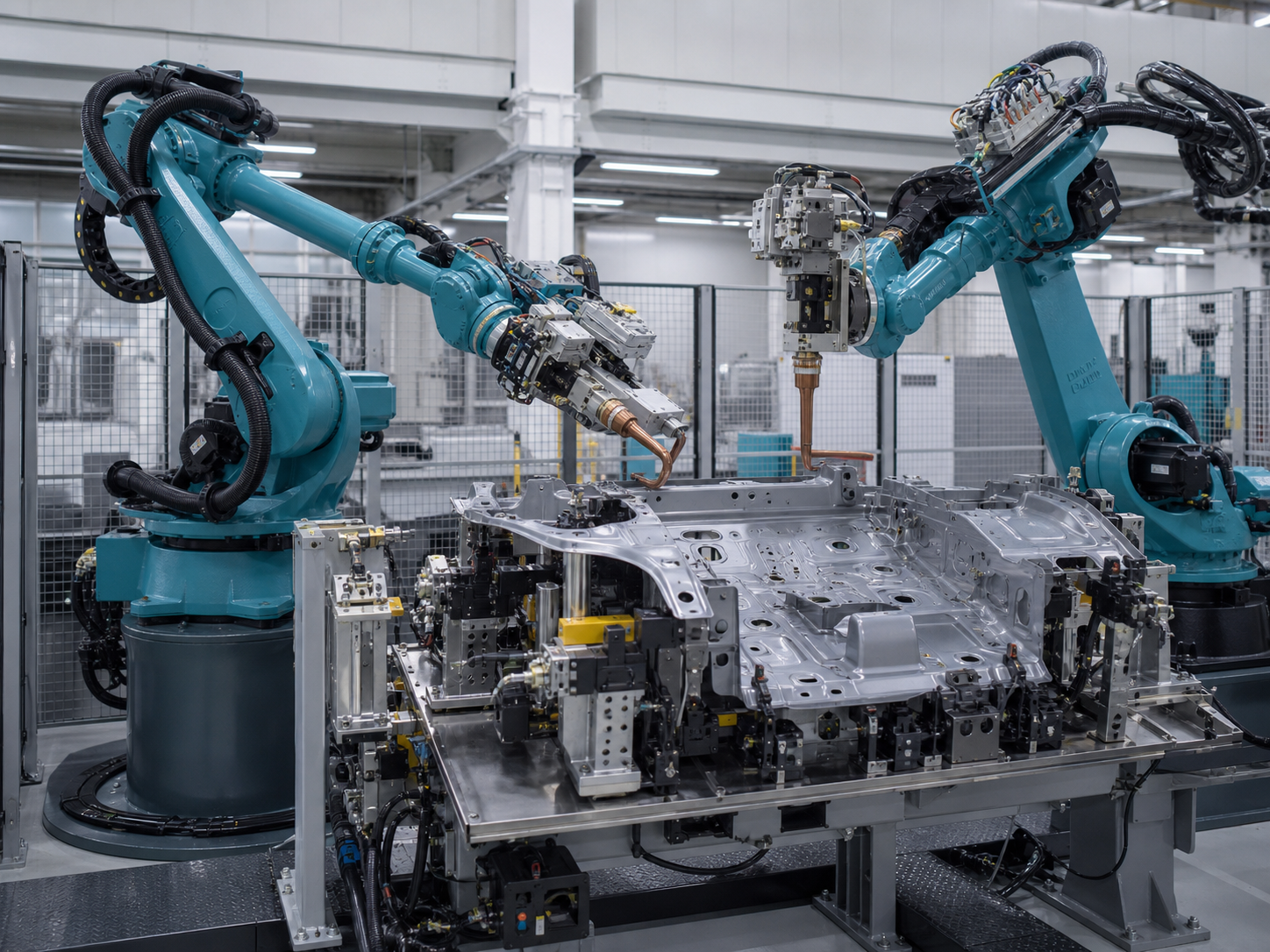
| Proceso de soldadura | Pinza de puntos servo, posicionamiento de fijación, opciones de estación multirrobot |
| Materiales típicos | Chapa laminada en frío, chapa galvanizada, chapa inoxidable. |
Comparta proceso, material, espesor, plano de la pieza, objetivo de producción y mercado de destino para esta celda robótica.
Envíe el tipo de proceso, material, espesor, fotos o planos de la pieza y mercado de entrega. Le responderemos con una configuración de célula de robot adecuada.

Comparta proceso, material, espesor, planos, objetivo de producción y mercado de destino. Recomendaremos una celda robótica adecuada.